ROS is an open-source, meta-operating system for your robot. It provides the services you would expect from an operating system, including hardware abstraction, low-level device control, implementation of commonly-used functionality, message-passing between processes, and package management. ROS can be used in building and simulating robotics applications, as well as unmanned ground vehicles and simultaneous localization and mapping (SLAM). To facilitate better integration within the ROS ecosystem Microstrain has develop an open source License free (MIT License) series of drivers specifically designed and tested for ROS.
Order on request
These products are requested only from ZSE. Our employees will contact you as soon as possible with an offer.
Order on request
This product is ordered on request!
An account at myZSE gives you the opportunity to order this product directly.
Simultaneous Localization and Mapping
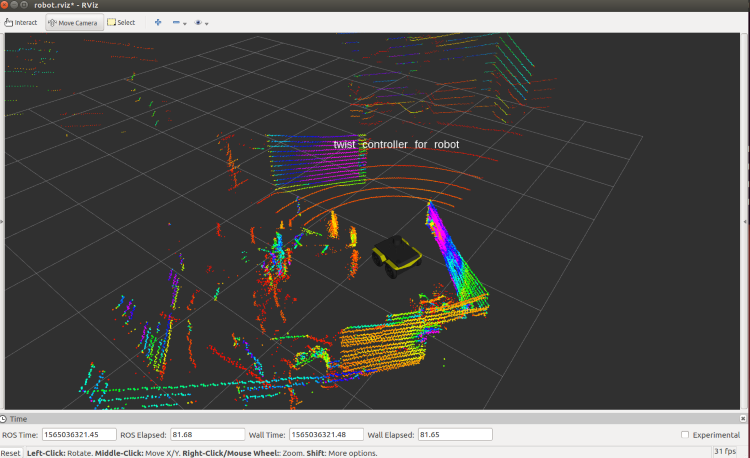
SLAM - (Simultaneous Localization and Mapping) is the location awareness and recording of the environment in a map of a device, robot, drone or other autonomous vehicles.
A robot that uses SLAM employs various types sensors such as radar, lidar, cameras, IMUs, and other technologies to understand its environment. By understanding its environment and how it is moving through it, a robot can more effectively map, navigate, and/or avoid obstacles. A good IMU is essential to this process. Accurately measuring the robot's true movement (not just theoretical) will lead to significantly superior results.
