3DM-GX5-GNSS/INS - High Performance GNSS Navigation Sensor, General Package
3DM-GX5-45
Order on request
These products are requested only from ZSE. Our employees will contact you as soon as possible with an offer.
Order on request
This product is ordered on request! An account at myZSE gives you the opportunity to order this product directly.
The 3DM-GX5 family of industrial grade inertial sensors provides a wide range of triaxial inertial measurements and computed attitude and navigation solutions.
The 3DM-GX5-45 all-in-one navigation solution features a high performance integrated multi- constellation GNSS receiver utilizing the GPS, GLONASS, BeiDou, and Galileo satellite constellations. Sensor measurements are fully calibrated, temperature-compensated, and mathematically- aligned to an orthogonal coordinate system for highly accurate outputs. The auto- adaptive estimation filter algorithm produces highly accurate computed outputs under dynamic conditions.
Compensation options include automatic compensation for magnetic anomalies, gyro and accelerometer noise, and noise effects. The computed outputs include pitch, roll, yaw, heading, and GNSS outputs- making it a complete AHRS (attitude and heading reference) solution. The use of Micro- Electro-Mechanical System (MEMS) technology provides a highly accurate, small, light-weight device.
The software can be used for device configuration, live data monitoring, and recording. Alternatively, the MIP Data Communications Protocol is available for development of custom interfaces and easy OEM Integration.
Product Highlights:
High performance integrated multi-constellation GNSS receiver and advanced MEMS sensor technology provide direct inertial measurements, and computed position, velocity, and attitude outputs in a small package
Triaxial accelerometer, gyroscope, magnetometer, temperature sensors, and a pressure altimeter achieve the best combination of measurement qualities
Dual on-board processors run a new Auto-Adaptive Extended Kalman Filter (EKF) for outstanding dynamic position, velocity, and attitude estimates
Features and Benefits:
Best in Class Performance
Fully calibrated, temperature-compensated, and mathematically-aligned to an orthogonal coordinate system for highly accurate outputs
High-performance, low-drift gyros with noise density of 0.005°/sec/√Hz and VRE of 0.001°/s/g2RMS
Accelerometer noise as low as 25 ug/√Hz
Ease of Use:
Automatic magnetometer calibration and anomaly rejection eliminates the need for field calibration
Automatically compensates for vehicle noise and vibration
Easy integration via comprehensive and fully backwardscompatible communication protocol
Cost Effective:
Out-of-the box solution reduces development time
Volume discounts
Applications:
GNSS-aided navigation system
Platform stabilization, artificial horizon
Satellite dish, radar, and antenna pointing
Specifications
General
Stück pro Packung
10
Gitterform
C1
Gitterform
C1
Gitterform
C1
Gitterform
C1
Gage (Grid)
0.2x
1.4
mm
Base
3.3x
2.4
mm
Base
3.3x
2.4
mm
Base
3.5x
2.4
mm
Base
3.5x
2.4
mm
Base
3.5x
2.4
mm
Base
3.5x
2.4
mm
Base
integrated-sensors
4.2x
1.54
Gage (Grid)
1x
0.65
mm
Base
4.2x
1.54
mm
Base
4.2x
1.54
mm
Nennwiderstand
60
Stück pro Packung
10
Gage (Grid)
1x
1.1
mm
Base
4.8x
2.4
mm
Gage (Grid)
5x
2
mm
Base
10x
3.4
mm
Gage (Grid)
2x
0.84
mm
Base
5.3x
1.5
mm
Base
5.3x
1.5
mm
Base
5.3x
1.5
mm
Base
5.3x
1.5
mm
Base
6.3x
2.8
mm
Base
6.3x
2.8
mm
Base
6.3x
2.8
mm
Base
6.3x
2.8
mm
Base
6.3x
2.8
mm
Base
6.3x
2.8
mm
Base
7.4x
2.8
mm
Gage (Grid)
3x
1.3
mm
Base
7.4x
2.8
mm
Base
7.4x
2.8
mm
Base
7.4x
2.8
mm
Base
7.4x
2.8
mm
Base
7.4x
2.8
mm
Base
7.4x
2.8
mm
Base
8x
1.4
mm
Gage (Grid)
4x
0.7
mm
Base
8x
1.4
mm
Data Outputs
Inertial Measurement Unit (IMU) outputs: acceleration, angular rate, magnetic field, ambient pressure, Delta-theta, Delta-velocity Computed outputs Extended Kalman Filter (EKF): filter status, timestamp, attitude estimates (in Euler angles, quaternion, orientation matrix), linear and compensated acceleration, bias compensated angular rate, pressure altitude, gravity-free linear acceleration, gyroscope and accelerometer bias, scale factors and uncertainties, gravity and magnetic models, and more. Complementary Filter (CF): attitude estimates (in Euler angles, quaternion, orientation matrix) stabilized, north and up vectors, GNSS correlation timestamp
Non linearity
Accelerometer: +/-0.04% fs Gyroscope: +/-0.06% fs
Gage (Grid)
5x
1.4
mm
Gage (Grid)
5x
1.4
mm
Gage (Grid)
5x
1.4
mm
Gage (Grid)
5x
1.4
mm
Gage (Grid)
5x
1.4
mm
Products
Your search returned no results.
3DM-GX5-GNSS/INS
3DM-GX5-45
GNSS-aided inertial navigation system, +/- 8G accelerometers and +/- 300 degree per second gyros. RS232 and USB output. Includes one-foot long non-magnetic antenna lead.
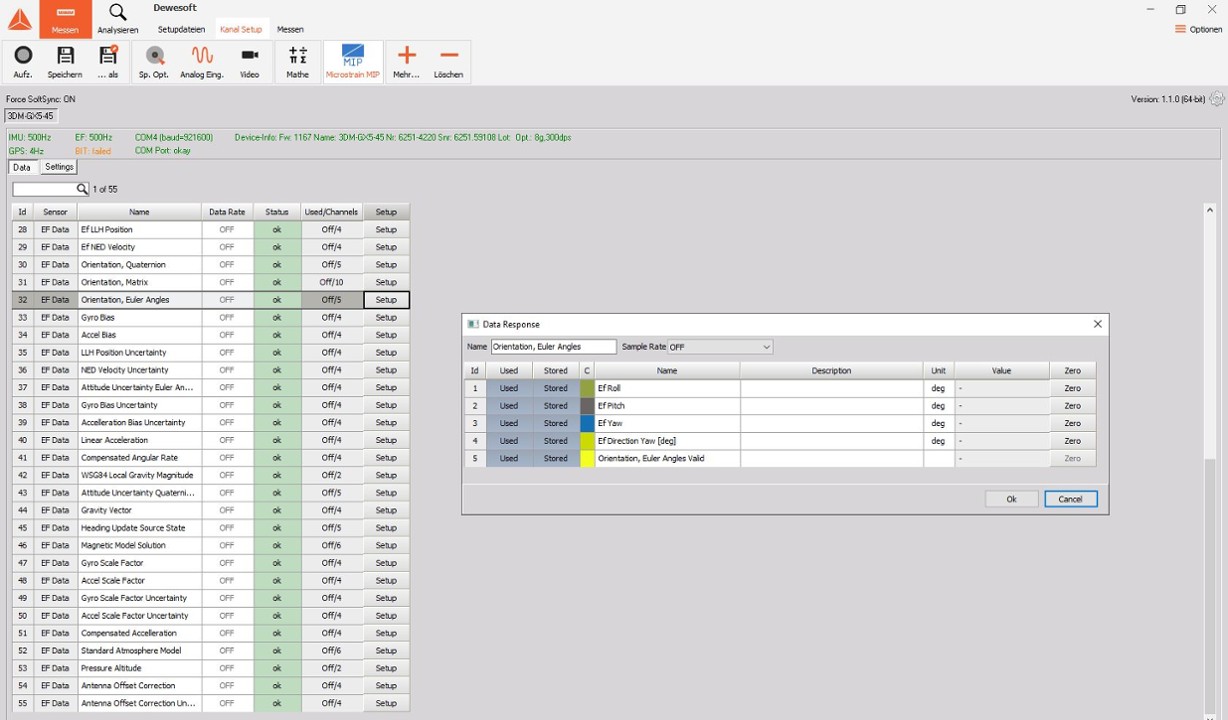
Supported features: - selectable COM Port and BaudRate (not relevant for USB connection) - reading firmware version, model number, serial number, model name and device options - Measurement of Acceleration, Angular Rate, Magnetometer Vectors & Orientation Matrix - setting the sampling rate in channel setup - activating/deactivating the magnetometers - realign up and north during measurement - selection of degree and radians in channel setup - DEWESoft™ soft-synchronisation is used
Your browser is no longer up to date. Please use a modern browser.
Unfortunately, we cannot guarantee Internet Explorer the full functionality of this website. We recommend that you use a modern browser (e.g. Chrome, Firefox, Edge, Safari). Microsoft also advises against using Internet Explorer for security reasons. You can download a new browser here: