3DM-GX5-AHRS – Kompaktes Navigationssystem mit AHRS
3DM-GX5-25
Bestellung auf Anfrage
Diese Produkte werden bei ZSE angefragt. Unsere Mitarbeiter werden sich so schnell wie möglich mit einem Angebot bei Ihnen melden.
Bestellung auf Anfrage
Dieses Produkt wird auf Anfrage bestellt! Eine Eintragung bei myZSE bietet Ihnen die Möglichkeit dieses Produkt direkt zu bestellen.
Klein, leicht, leistungsfähig – Das AHRS / IMU System von MicroStrain
Mit dem 3DM-GX5-25 von MicroStrain präsentiert ZSE das kleinste AHRS (Attitude Heading Reference System) auf dem Markt. Die geringen Abmessungen von 36.0 x 36.6 x 11.1 mm bei einem Eigengewicht von 16,5 Gramm garantieren ein Maximum an Anwendungsmöglichkeiten.
Merkmale:
Das zur Zeit kleinste und leichteste AHRS auf dem Markt mit einem Gewicht von nur 16,5 Gramm
Das 3DM-GX5-25 AHRS bietet eine Auswahl von Ausgangsdaten wie voll Kalibrierte Inertial-Messungen (Beschleunigung, Winkelrate und Magnetfeld oder Delta-Winkel und Delta-Geschwindigkeits-Vektoren) zur Berechnung von Orientierungsannahmen wie Pitch, Roll and Heading (Yaw) oder Rotations-Matrix. Alle Mengen sind voll Temperaturkompensiert und mathematisch abgestimmt mit einem orthogonalen Koordinationssystem. Die Winkelratenergebnisse sind weiterhin korrigiert in Bezug auf G-Empfindlichkeit und der Nichtlinearität des Skalierungsfaktors dritter Ordnung.
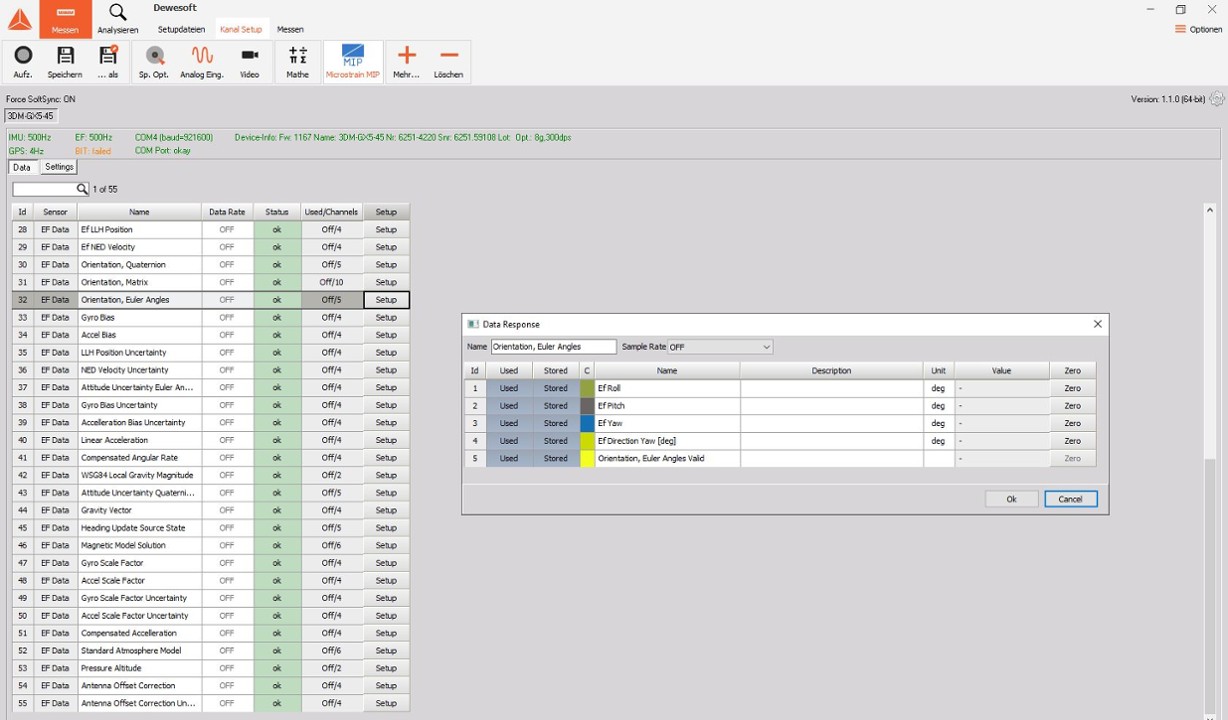
Funktionen: - Arbeitet synchron mit allen DEWESoft Datenquellen - COM Port und BaudRate einstellbar, (nicht relevant für USB) - Lesen der Firmware Version, Modell und Seriennummer sowie der Sensorbereiche - Messen aller Datenströme und Flags des MIP Protokolls - Einstellen der Ausgaberate im Channel-Setup - Darstellung in Grad oder rad wählbar - Nullen in Einbaulage - DEWESoft™ Soft-Synchronisation
Ihr Browser ist nicht mehr aktuell. Bitte verwenden Sie einen modernen Browser.
Dem Internet Explorer können wir leider nicht die volle Funktionalität dieser Webseite gewährleisten. Wir empfehlen Ihnen, einen modernen Browser (z.B. Chrome, Firefox, Edge, Safari) zu verwenden. Auch Microsoft rät aus Sicherheitsgründen von der Verwendung des Internet Explorers ab. Hier können Sie sich einen neuen Browser herunterladen: