Klein, leicht, leistungsfähig – Das miniatur Inertial-Messsystem (IMU) / Vertical-Gyro von MicroStrain
Mit dem 3DM-GX5-15 von MicroStrain präsentiert ZSE das kleinste IMU/VRU System auf dem Markt. Die geringen Abmessungen von 36,0 x 36,6 x 11,1 mm bei einem Eigengewicht von 16,5 Gramm garantieren ein Maximum an Anwendungsmöglichkeiten.
Merkmale:
- Die zur Zeit kleinste und leichteste IMU / VRU auf dem Markt mit einem Gewicht von nur 16,5 Gramm
- 3-achs MEMS-Beschleunigungsaufnehmer, Noise kleiner 25 µg/√Hz
- 3-achs High Performance Gyros, (low-drift, noise density von 0,005°/sec/√Hz und VRE von 0,001°/s/g²RMS)
- Barometrischer Höhenmesser
- Duale On-Board-CPU für Auto-Adaptiven Extended Kalman Filter (EKF)
- Voll temperaturkompensiert über den gesamten Betriebstemperaturbereich von -40 °C bis +85°C
- Kalibriert bezüglich Sensor Fehlausrichtung, Gyro G Empfindlichkeit und Gyro Skalierungsfaktor Nichtlinearität
- Verbesserte Navigationsleistung unter Vibrationseinfluss durch hohe Abtastrate und digitale Filterung/Skalierung in physikalische Maßeinheiten
- Integrierter Coning- und Sculling-Filter
- Integrierte RS-232 und USB 2.0 Schnittstelle
- Versorgungsspannungsbereich: 4 bis 36 VDC
- Individuelle Übertragungsraten: 1Hz bis max. 1000Hz für jedes Datenpaket im MIP-Protokoll einstellbar
- Ausgangsdaten: Euler-Winkel, Rotations-Matrix, Delta-Winkel & Delta-Geschwindigkeit, Beschleunigung, Winkelrate sowie Luftdruck
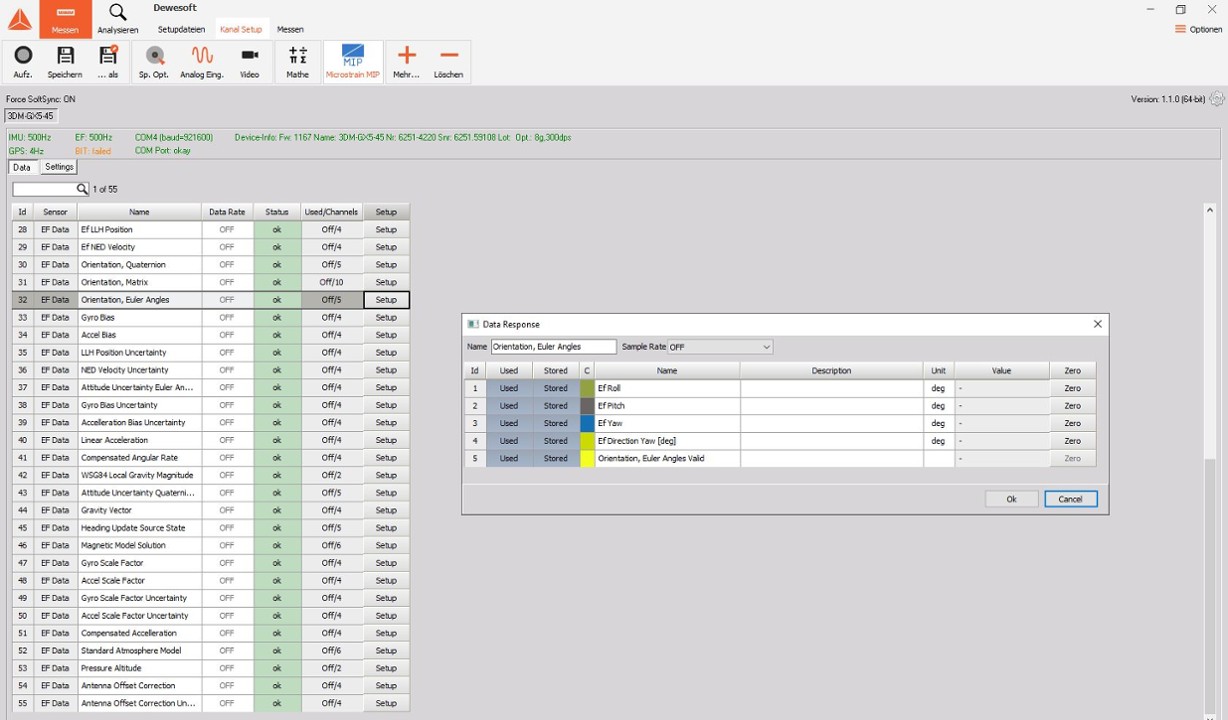
- Optional: DEWESoft MIP-Plugin / Treiber erhältlich.
Das 3DM-GX5-15 System bietet eine Auswahl von Ausgangsdaten wie voll Kalibrierte Inertial-Messungen (Beschleunigung und Winkelrate oder Delta-Winkel und Delta-Geschwindigkeits-Vektoren) zur Berechnung von Orientierungsannahmen wie Pitch, Roll and Heading (Yaw) oder Rotations-Matrix. Alle Mengen sind voll Temperaturkompensiert und mathematisch abgestimmt mit einem orthogonalen Koordinationssystem. Die Winkelratenergebnisse sind weiterhin korrigiert in Bezug auf G-Empfindlichkeit und der Nichtlinearität des Skalierungsfaktors dritter Ordnung.
Anwendungen
- Trägheits unterstützung von GPS-Systemen
- Fluglagekorrektur
- Positionsverfolgung
- Unbemannte Fahrzeuge
- Navigation
- Künstlicher Horizont
- Kompass
- Simulation von künstlichen Umgebungen
- Biomedizinische Animation
- Freie Spurkontrolle und Nachführung
- Plattformstabilisierung
- Positionierung von Kameras, und Antennen
- Robotik